Training Sites; Mixed Pixels
13-4: Given a satellite-mounted sensor operating in the Visible-Near IR that has a spatial resolution of 500 meters. State three classes or features that will be well suited to observations at this level. Mention two that won't. ANSWER
The alternative to depending on training sites for classification is to apply the concept of signature extension. This term refers to the assumption that we may define a single, fairly constant, spectral signature as characteristic of any class, and that this signature has broad (universal) applicability to any scene in a region, or even worldwide. As a specific example, the signature for mature winter wheat should be essentially the same for fields in the U.S. Great Plains, Argentina, the Ukraine, and Australia, provided we compensate for such variables as differing air masses, Sun position, soil types, soil moisture, etc. If that assumption proves true, then an unknown feature or class in a given scene anywhere should be classifiable by comparing its spectral properties (for a Landsat pixel, its multiband digital number [DN] values) to a data bank containing standard values for many classes. We assume the closest fit of the unknown's DN values to those of a class in the bank identifies it.
13-5: Look out your nearest window and gaze over the scene outside. Now, pretend you have a spectrometer available and wish to obtain spectral signatures for a data bank. Think of problems you might encounter. ANSWER
A "mixed pixel" results from the fact that individual areas, consisting of different features or classes may be below (smaller than) the resolution of the sensor. Consider this hypothetical "map" of a rural setting
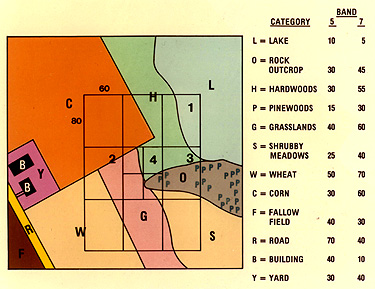
13-6: In the above figure, pick out the two "worst" pixels in terms of mixture. ANSWER
In this instance, we treat each category as though it were more or less homogeneous. As imaged by a sensor whose instantaneous field of view (IFOV) (controlled by optics and sampling rates) leads to a small pixel size, if an individual pixel happens to lie completely within, or fortuitously coincides with, the boundaries of a given class, then the multiband spectral properties of the dominant material(s) in the enclosed class will determine the DNs for that pixel. It is more likely, however, that the pixel will straddle or cut across several class or feature boundaries. The resulting spectral content is then a composite or weighted average of the spectral responses from each internal class. Recognition of each feature or class becomes difficult, since there are two primary unknowns to account for-the identity of the class and its relative proportion in the mix. Mathematical methods are available to solve for these unknowns, but there always remains some statistical uncertainty. One improvement is to reduce pixel size (increase resolution), as is done in the central rectangle above, so that more pixels fall within the space occupied by a single class/feature and fewer pixels cross boundaries. Going in the other direction, note the effect of enlarging the pixel, say, to the size of the outer boundary of the cluster of nine. The key rule in optimizing classification is to seek a resolution that approximates the sizes of the smallest specific classes whose identities we seek.
Collaborators: Code 935 NASA GSFC, GST, USAF Academy
Contributor Information
Last Updated: September '99
Webmaster: Bill Dickinson Jr.
Site Curator: Nannette Fekete
Please direct any comments to rstweb@gst.com.
